


Motorblog
Viele interessante Artikel befassen sich mit der Rotationsmatrix und wie man diese zur Transformation zwischen Koordinatensystemen verwenden kann. Für meinen konkreten Anwendungsfall – der Auswertung von fahrdynamischen Messdaten im Fahrzeugbetrieb – konnte ich jedoch kein “Kochrezept” finden welches mir bei der Umrechnung von gemessenen Beschleunigungswerten aus dem gedrehten, sensorfesten Koordinatensystem in das fahrzeugfeste Koordinantensystem weiterhelfen konnte.
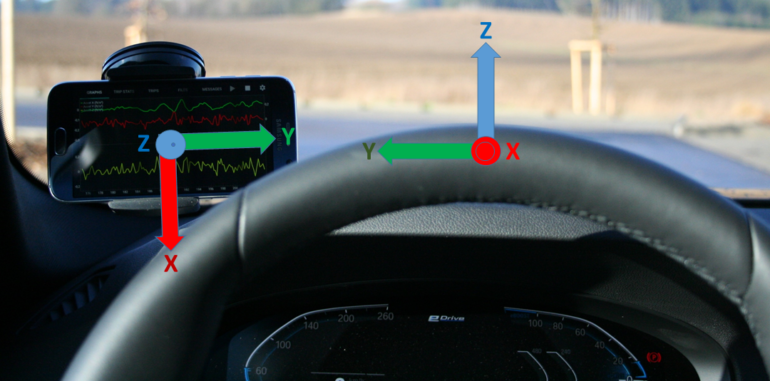
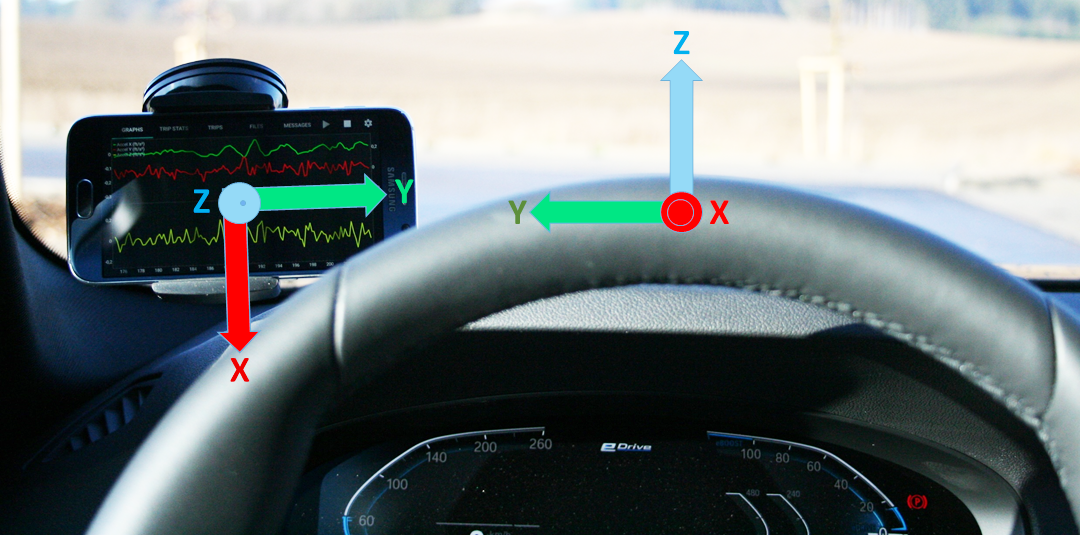
Darstellung der Smartphone-Position und der daraus resultierenden Verschiebung der Beschleunigungsachsen zwischen sensorfestem und fahrzeugfestem Koordinatensystem
Auf meinem Weg der Informationsbeschaffung bin ich unter anderen auch immer wieder auf den Motorblog-Beitrag von Paul Balzer und die Verlesungsvideos von Prof. Dr.-Ing. Jörg J. Buchholz zurückgekommen und habe im direkten Austausch wertvolle Tipps erhalten. Dabei ist auch das Angebot dieses Gastbeitrags entstanden, welches ich hiermit gerne wahrnehme um zu erläutern mit welcher Verfahrensweise ich einen Lösungsweg gefunden habe.

[Tutorial] Rotationsmatrix und Quaternion einfach erklärt in DIN70000 ZYX Konvention
Die Rotation eines Körpers im Raum ist ein Thema, welches einen Ingenieur in vielen Einsatzbereichen tangiert. Es gibt auch schon unzählige Webseiten dazu und auch die Wikipedia lässt sich zum Thema Drehmatrix oder Eulersche-Winkel ausführlich aus.
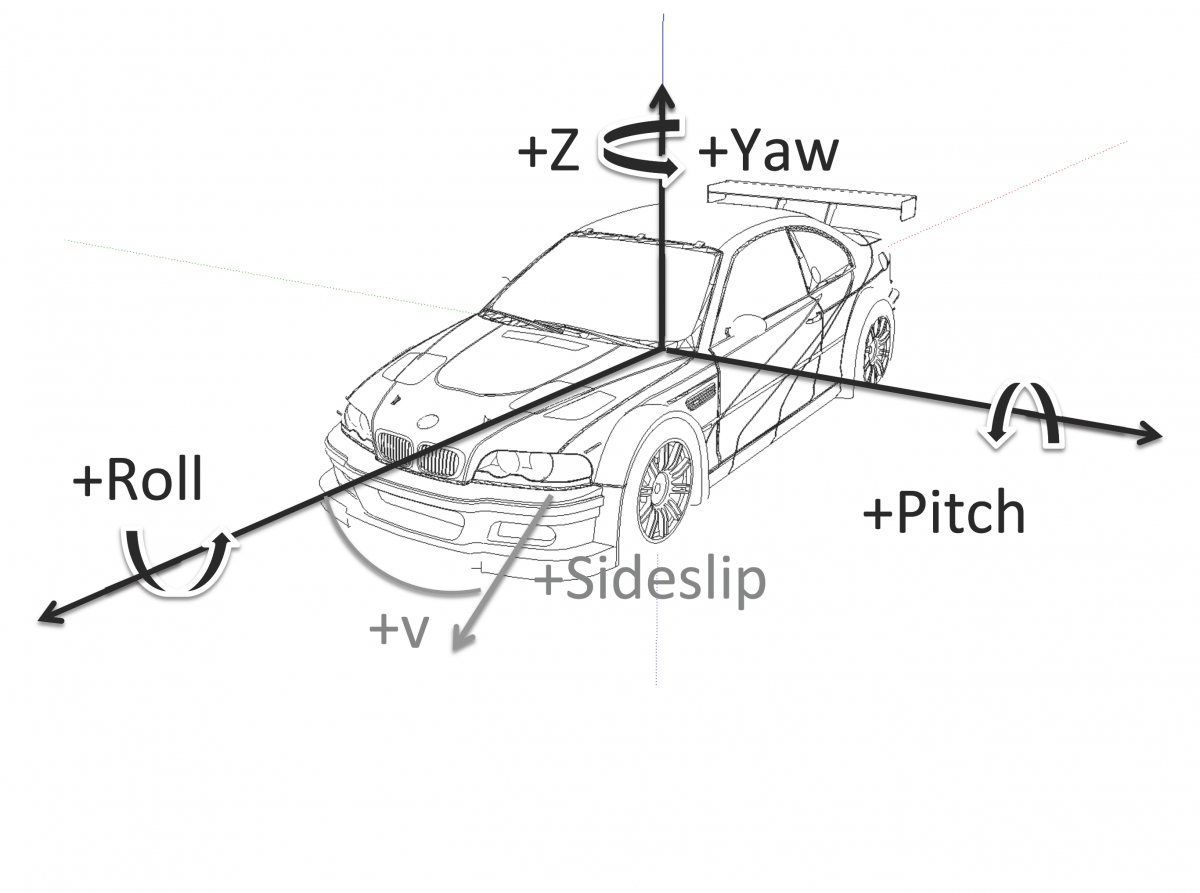
Doch so richtig gepasst hat bisher keine Beschreibung. Deshalb an dieser Stelle noch einmal eine ausführliche und einfache Beschreibung der 3D Rotation eines Körpers/Vektors mit Euler-Winkeln nach ZYX-Konvention im DIN70000 Koordinatensystem des Fahrzeugs.
Continue Reading