


Motorblog
Jeder Autofahrer kennt die Situation: Man fährt im Dunkeln, vielleicht bei Regen, sieht einen leuchtenden, wackelnden Weihnachtsbaum am Straßenrand. Ungefähr 1m hoch, komische Bewegungsabläufe. Man nähert sich und stellt fest: Ooooops, ein Kind. Puuuh, zum Glück hat es Reflexionselemente in der Kleidung (genauer: retroreflektierende Stoffe).
Man nähert sich weiter und erschrickt, denn das Kind läuft an der Hand eines Erwachsenen, den man aber überhaupt nicht wahrgenommen hat.
Ab einem gewissen Alter (=Kleidungsgröße) ist die textilverarbeitende Industrie offensichtlich nicht mehr so motiviert, reflektierende Stoffe oder Nähte zu verwenden.
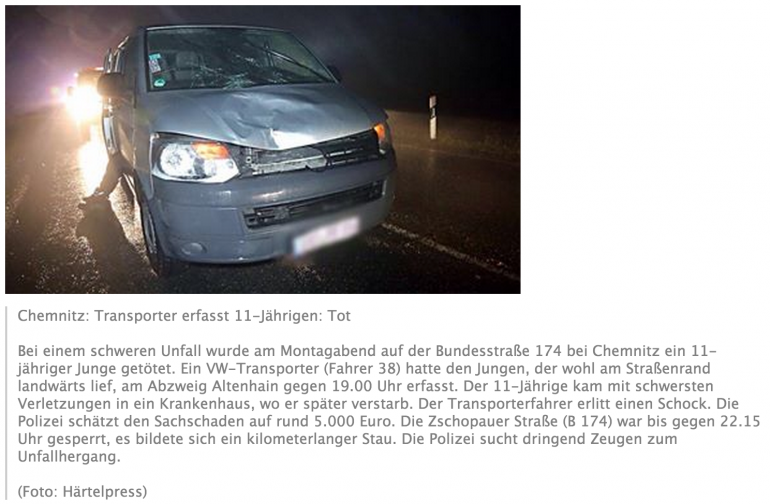
Ganz bittere Situation – für alle Seiten. Der Mann, der den kleinen Jungen angefahren hat, wird auch des Lebens nicht mehr froh. Von der Familie des erfassten 11-jährigen ganz zu schweigen. Jede einzelne dieser Geschichten gilt es zu verhindern. Daran arbeiten die Automobilhersteller jeden Tag! Fahrerassistenzsysteme, Notbremsassistenten, Umfeldsensorik und Co. sind teilweise schon verfügbar, können aber nicht hexen.
Kleinster Aufwand: Klackband
Die einfachste Variante, zu der auch ich greife, sind Klackbänder, die man einfach um’s Bein schnappt:

Sieht nicht schön aus, hilft aber dem Autofahrer enorm einen wahrzunehmen, denn die Beine sind der tiefste Punkt und somit zuerst vom Scheinwerfer erfasst. Fährt man Fahrrad, so ist die “auf/ab” Bewegung charakteristisch und hilft dem Autofahrer eine bessere Situationsanalyse vorzunehmen.
So stellte das Transportation Research Institute der Universität Michigan fest, dass mit Hand- und Knöchelarmbändern die Wahrnehmungsentfernung von 40m auf 156m steigt.
Wahrnehmungsentfernung steigt um +290%
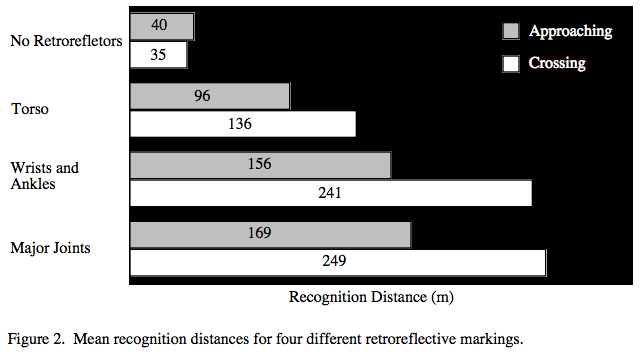
Quelle: Luoma, Schumann, Traube – EFFECTS OF RETROREFLECTOR POSITIONING ON NIGHTTIME RECOGNITION OF PEDESTRIANS, Universität Michigan, 1995
Wahrnehmungssteigerung durch charakteristische Bewegung
Ein wichtiger Punkt ist dabei, dass die Wahrnehmung enorm steigt, wenn der Mensch eine menschliche Bewegung erkennt. Das heißt: Sind typische Bewegungsmuster (Beinbewegung, Armschlenkern, Kopf, Beine, etc.) erkennbar, kann der Mensch die Situation wesentlich besser wahrnehmen.
So stellte Tyrrell, Wood, Chaparro et. al. in “Seeing pedestrians at night : visual clutter does not mask biological motion” fest, dass sogar in funkelnder, leuchtender Umgebung der Mensch eine menschliche Bewegung zu 100% erkennen kann, wenn die richtigen Punkte reflektieren.
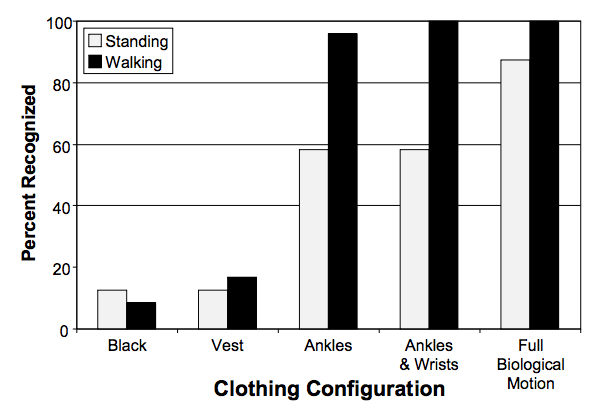
Quelle: Tyrrell, Richard A. and Wood, Joanne M. and Chaparro, Alex and Carberry, Trent P. and Chu, Byoung-Sun and Marszalek, Ralph P. (2009) Seeing pedestrians at night : visual clutter does not mask biological motion. Accidents Analysis and Prevention, 41(3). pp. 506-512.
Die naheliegende Konsequenz aus diesen Erkenntnissen wäre doch eigentlich, dass in Herbst- und Wintermode einfach an bestimmten Stellen retroreflektierende Materialien eingebracht werden.
Retroreflektierendes Material für Kleidung
Das Material ist in allen Farben und Formen erhältlich und lässt sich in Kleidung integrieren. Im einfachsten Fall wird nur eine Naht mit retroreflektierendem Garn ausgeführt.

unter CC-BY-SA2.0 Lizenz von Flickr.com
Am Tage überhaupt nicht wahrnehmbar, in der Nacht wird die Kleidung zum potentiellen Lebensretter. Die Farbe kann an bestehende Kleidung angepasst werden, sodass rein modemäßig überhaupt keine Einschränkung dadurch entsteht.

unter CC-BY-SA2.0 Lizenz von flickr.com
Vorteil für Fahrerassistenzsysteme
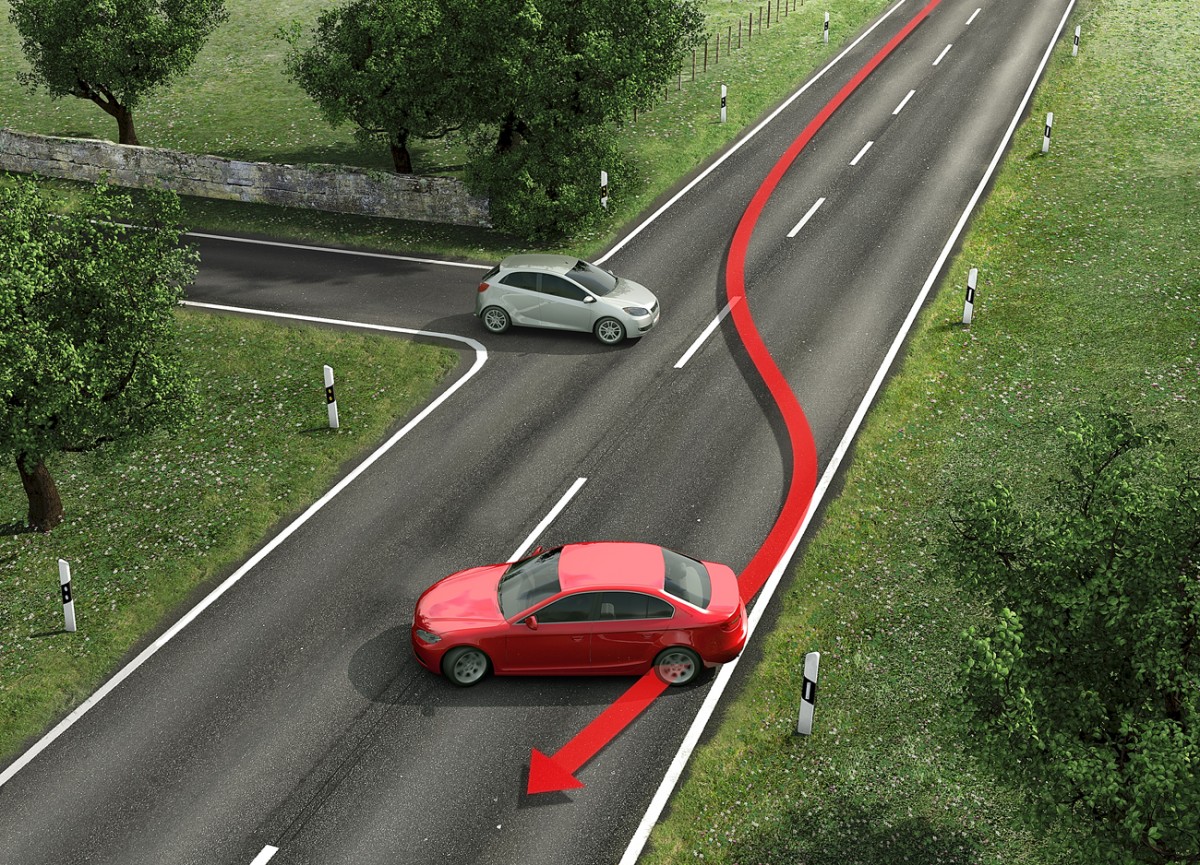
Die aktuelle Entwicklung bei der Umfeldsensorik geht vor allem zu Radar sowie (Stereo-)Video. Daimler nennt es beispielsweise 6D-Ansatz:
Hier liegt der Knackpunkt: Ein Radar kann Fußgänger bzw. Radfahrer nicht wahrnehmen, das Auto muss sich auf die Videosensorik verlassen. Im Dunkeln kann auch die beste Kamera keinen dunkel gekleideten Menschen sehen, somit kann auch kein 6D-Ansatz (6 Dimensionen, weil Daimler die 3 Raumkoordinaten X, Y und Z sowie noch die 3 Geschwindigkeiten in die Raumrichtungen als Zustandsvektor für Objekte im Sichtfeld berechnet) helfen.

unter CC-BY-SA3.0 Lizenz von Wikimedia Commons
Die physikalische Eigenschaft der retroreflektierenden Materialien ist, dass sie genau in die Richtung das Licht zurück senden, aus der sie angestrahlt werden. Das stellt sicher, dass nicht alle Menschen rumlaufen wie mobile Straßenlaternen, sondern nur der etwas wahrnimmt, der auch aktiv anleuchtet.
Die Videosensorik muss nun im Dunkeln alle Lichtquellen irgendwie auseinander halten (parkende, wegfahrende & entgegenkommende Autos, Laternen, Reklame usw.). Hier hilft aber die physikalische Eigenschaft der retroreflektierenden Folien abermals:
Da den Fahrzeugherstellern die Lichttemperatur ihrer LED/Xenon Scheinwerfer bekannt ist, kann z.B. über den HSV Farbraum algorithmisch relativ einfach nach diesen Farbtemperaturen im Videobild gesucht werden. Wird eine menschenähnliche Form oder Bewegung erkannt, steigt die Wahrscheinlichkeit, dass da tatsächlich ein Mensch ist, vor dem es auszuweichen bzw. abzubremsen gilt.
Fusion mit Infrarot
Es besteht natürlich auch die Möglichkeit dieses Ergebnis mit Messungen aus den Infrarotkameras (oder auch Nachtsichtkameras genannt) zu fusionieren, um bessere Ergebnisse zu erzielen, wie Han und Bhanu in “Fusion of color and infrared video for moving human detection” zeigen.
Plädoyer
Die EU regelt die Leistung von Staubsaugern, sie regelt zu verwendende Glühbirnen, sie regelt Abgasgrenzwerte, da könnte man doch mal die Frage stellen, ob es nicht für die Textilindustrie ein paar Vorgaben geben könnte Herbst- & Wintermode entsprechend sicherheitsrelevant herzustellen. Die Menschen haben auch das Rauchverbot in Kneipen/Diskos akzeptiert, ich denke jetzt im Nachhinein sind nur einige wenige wirklich böse darüber. Ähnlich könnte es auch mit Reflektionsmaterialien in der Kleidung funktionieren.
Ein anderer Ansatz wäre über die Freiwilligkeit bzw. die Einsicht jedes Einzelnen, aber das dauert eben. Fahrradhelme werden auch langsam in der Breite akzeptiert, vielleicht folgt auch das reflektierende Material bald.
Die Kampagne “bester beifahrer” des Deutschen Verkehrssicherheitsrats (DVR) hat eine kostenfreie App zum Thema Fahrerassistenzsysteme entwickelt.
Unter http://www.bester-beifahrer.de ist die App kostenlos zum Download verfügbar.
Außerdem gibt es ein Lexikon, welches die wichtigsten Systeme kurz erläutert.

Da habe ich aber große Augen bekommen, als Dr. Zetsche heute auf der re:publica davon sprach, dass das Design der Grund wäre, weshalb Fahrzeuge deutscher Produktion mit Radar+Stereokamera ihr Umfeld wahrnehmen und nicht mit einem Laserscanner. Das Google Self-Driving-Car hingegen setzt auf Laserscanner.
Wenn Sie mal so ein Google-Fahrzeug gesehen haben, sieht das in etwa aus wie eine Mondlandefähre. Und dann haben sie oben auf dem Dach diese Teleskop-Geschichte, und die kostet in etwa so viel wie das Auto darunter.
Da mag er Recht haben, denn Google setzt auf Velodyne HDL-64E sensoren, welche 360° Rundumsicht ermöglichen.
[Update 10/2013] Aus einer Dissertation kann man entnehmen, dass auch Daimler mit dem Velodyne arbeitet, was die Aussage von Konzernchef Dr. Zetsche irgendwie noch inhaltsloser erscheinen lässt.
![Auszug aus [Schmid, M. R. (2012). Umgebungserfassung für Fahrerassistenzsysteme mit hierarchischen Belegungskarten. Universität der Bundeswehr München. Retrieved from http://d-nb.info/1030485593/]](https://www.cbcity.de/wp-content/uploads/2013/05/Daimler-Velodyne-770x605.jpg)
Auszug aus [Schmid, M. R. (2012). Umgebungserfassung für Fahrerassistenzsysteme mit hierarchischen Belegungskarten. Universität der Bundeswehr München. Retrieved from http://d-nb.info/1030485593/]

Quelle: Ibeo Laserscanner
– Der Multi-Applikations-Sensor, Braunschweiger Verkehrskolloquium, 2006
Diese Abbildung, welche aus dem Jahr 2006 stammt, zeigt zahlreiche nahtlose Integrationsmöglichkeiten, ich vermute also eher den betriebswirtschaftlichen Teil der Aussage: Denn die Sensoren sind auf Grund fehlender Massenproduktion einfach noch zu teuer.
[Update 10/2013: Auch Daimler schafft das so schön.]
![Auszug aus [Schmid, M. R. (2012). Umgebungserfassung für Fahrerassistenzsysteme mit hierarchischen Belegungskarten. Universität der Bundeswehr München. Retrieved from http://d-nb.info/1030485593/]](https://www.cbcity.de/wp-content/uploads/2013/05/Daimler-E-Klasse-Sick-Lidar-770x542.jpg)
Auszug aus [Schmid, M. R. (2012). Umgebungserfassung für Fahrerassistenzsysteme mit hierarchischen Belegungskarten. Universität der Bundeswehr München. Retrieved from http://d-nb.info/1030485593/]
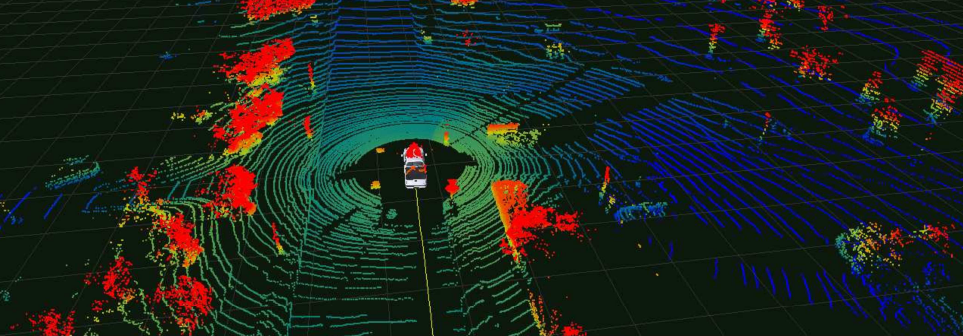
Am gestrigen 07.05.2012 hat Google für Nevada, U.S.A. die Lizenz erhalten, welche die automobile Welt verändern könnte. Google darf die Testflotte, bestehend aus sechs Toyota Prius, einem Audi TT und einem Lexus RX450h auf öffentlichen Straßen fahren lassen. Der Gag an der Sache ist, dass die Fahrzeuge vollständig autonom fahren können. Von der Wegplanung über die Umfeldwahrnehmung, Kollisionsvermeidung, Spurwechsel, Abbiegemanöver als auch Ein-/Ausparken ist alles implementiert, was ein Fahrzeug können muss.

Umfeldwahrnehmung durch einen 3D Laserscanner | Quelle: Pandey, McBride - Extrinsic calibration of a 3d laser scanner and an omnidirectional camera, http://dx.doi.org/10.3182/20100906-3-IT-2019.00059
Der leitende Forscher bei Google ist der deutsche, ehemalige Stanford Professor Sebastian Thrun, welcher einräumt, dass die Fehlerquote der Fahrzeuge derzeit noch zu hoch sei. Im Schnitt alle paar 1000km müsse der speziell geschulte Testfahrer, welcher immer an Board ist, eingreifen. Dies sei zwar besser als ein betrunkener Fahrer, allerdings noch wesentlich schlechter als ein aufgeweckter normaler Durchschnittsfahrer, so Thrun. Und genau das ist der Grund, weshalb es jetzt an den Flottentest geht. Die Algorithmen können nur besser werden, wenn daran geforscht, gearbeitet und Fehler gemacht werden. Es gilt Millionen von Testkilometern zu absolvieren, damit die Fehlerquote auf niedrige ppm sinkt und eine signifikante Verbesserung gegenüber dem humanen Fahrer erreicht werden kann.