


Motorblog

Da habe ich aber große Augen bekommen, als Dr. Zetsche heute auf der re:publica davon sprach, dass das Design der Grund wäre, weshalb Fahrzeuge deutscher Produktion mit Radar+Stereokamera ihr Umfeld wahrnehmen und nicht mit einem Laserscanner. Das Google Self-Driving-Car hingegen setzt auf Laserscanner.
Wenn Sie mal so ein Google-Fahrzeug gesehen haben, sieht das in etwa aus wie eine Mondlandefähre. Und dann haben sie oben auf dem Dach diese Teleskop-Geschichte, und die kostet in etwa so viel wie das Auto darunter.
Da mag er Recht haben, denn Google setzt auf Velodyne HDL-64E sensoren, welche 360° Rundumsicht ermöglichen.
[Update 10/2013] Aus einer Dissertation kann man entnehmen, dass auch Daimler mit dem Velodyne arbeitet, was die Aussage von Konzernchef Dr. Zetsche irgendwie noch inhaltsloser erscheinen lässt.
![Auszug aus [Schmid, M. R. (2012). Umgebungserfassung für Fahrerassistenzsysteme mit hierarchischen Belegungskarten. Universität der Bundeswehr München. Retrieved from http://d-nb.info/1030485593/]](https://www.cbcity.de/wp-content/uploads/2013/05/Daimler-Velodyne-770x605.jpg)
Auszug aus [Schmid, M. R. (2012). Umgebungserfassung für Fahrerassistenzsysteme mit hierarchischen Belegungskarten. Universität der Bundeswehr München. Retrieved from http://d-nb.info/1030485593/]

Quelle: Ibeo Laserscanner
– Der Multi-Applikations-Sensor, Braunschweiger Verkehrskolloquium, 2006
Diese Abbildung, welche aus dem Jahr 2006 stammt, zeigt zahlreiche nahtlose Integrationsmöglichkeiten, ich vermute also eher den betriebswirtschaftlichen Teil der Aussage: Denn die Sensoren sind auf Grund fehlender Massenproduktion einfach noch zu teuer.
[Update 10/2013: Auch Daimler schafft das so schön.]
![Auszug aus [Schmid, M. R. (2012). Umgebungserfassung für Fahrerassistenzsysteme mit hierarchischen Belegungskarten. Universität der Bundeswehr München. Retrieved from http://d-nb.info/1030485593/]](https://www.cbcity.de/wp-content/uploads/2013/05/Daimler-E-Klasse-Sick-Lidar-770x542.jpg)
Auszug aus [Schmid, M. R. (2012). Umgebungserfassung für Fahrerassistenzsysteme mit hierarchischen Belegungskarten. Universität der Bundeswehr München. Retrieved from http://d-nb.info/1030485593/]
Ab einer gewissen Auslastung entsteht auf einer Autobahn Stau, auch wenn es zu keinem Unfall gekommen ist. Das liegt vor allem an der Unzulänglichkeit des Fahrers. Jeder der sich mit Regelungstechnik etwas auskennt, der weiß, dass ein System mit Totzeit sehr schwer zu regeln ist. Die Reaktionszeit des Fahrers ist die Totzeit im System und die führt dazu, dass sich der Verkehrsfluss in Wellen aufschaukelt.
Reduziert man die Schwäche des Fahrers durch intelligente Systeme, welche Informationen entlang der Autobahn übertragen, so kann man Stau völlig vermeiden (Unfälle mal ausgeschlossen, welche zur Sperrung führen)!
![Auswirkungen der Car2Car Kommunikation auf Auslastung, Reisezeit und Kraftstoffverbrauch in Abhängigkeit des Ausstattungsgrades. [Quelle: Treiber, Kesting, Helbing - Verkehr verstehen und beherrschen, Publikation TU Dresden, Online abrufbar http://www.vwi.tu-dresden.de/~treiber/publications/VerkehrVerstehen.pdf]](https://www.cbcity.de/wp-content/uploads/2013/01/Car2Car-520x407.jpg)
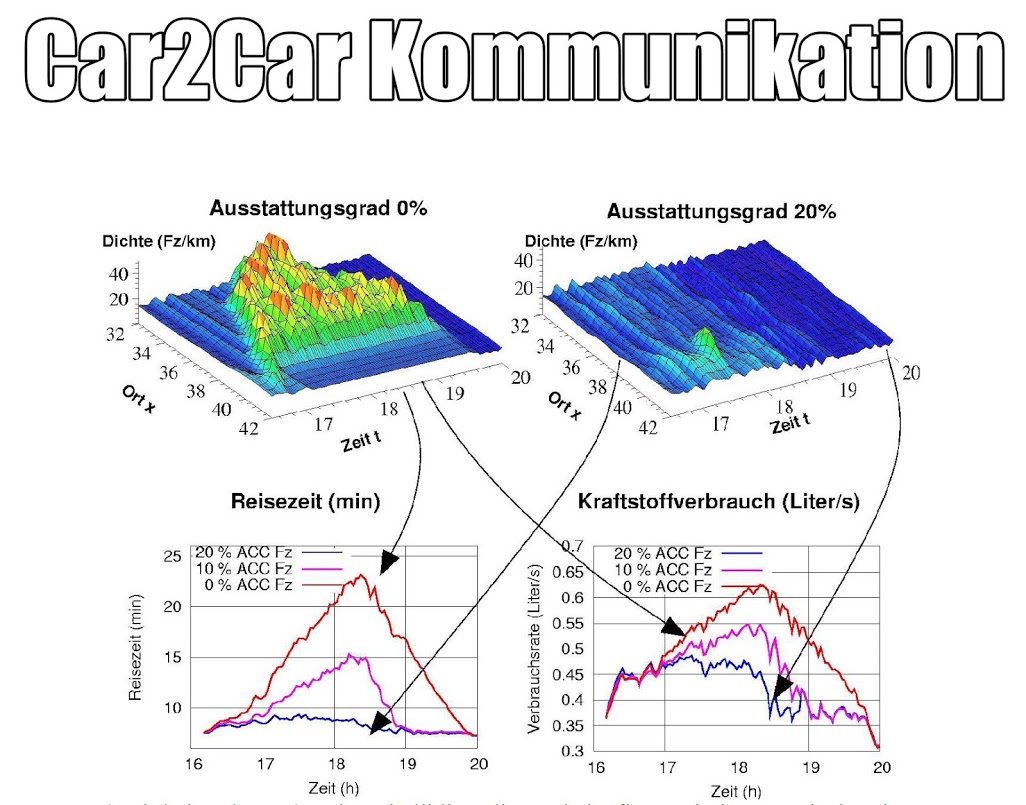
Auswirkungen der Car2Car Kommunikation auf Auslastung, Reisezeit und Kraftstoffverbrauch in Abhängigkeit des Ausstattungsgrades. [Quelle: Treiber, Kesting, Helbing – Verkehr verstehen und beherrschen, Publikation TU Dresden, Online abrufbar http://www.vwi.tu-dresden.de/~treiber/publications/VerkehrVerstehen.pdf]
Simulationen zeigen, dass bereits ab einem Ausstattungsgrad von 20% der Fahrzeuge ein Stau auf Grund von Überlastung der Autobahn vollständig eliminiert werden kann.

Der Elektromotor ist eine höchst effektive Arbeitsmaschine. Sie wandelt elektrische Energie in Bewegungsenergie. Dabei wird ein Wirkungsgrad von ca. 98% erreicht. Das ist ein grandioser Wirkungsgrad. Als Wirkungsgrad wird allgemein definiert, wieviel Prozent der rein gesteckten Leistung für die eigentliche Hauptaufgabe genutzt wird. Ideal wären 100%.

Schaut man sich dieses Sankey Diagramm des Elektromotors, bei seiner Hauptaufgabe im Fahrzeug, der Erzeugung von Bewegungsenergie, an, so scheint der Verbrennungsmotor chancenlos.
Eine Frage der Definition.

Eine oft diskutierte Fragestellung ergibt sich, wenn am Stammtisch die Beschleunigungsfähigkeit zweier PKW (idealerweise von zwei Personen neu erworbene Fahrzeuge) verglichen wird…
Mein neuer Diesel hat 130PS, dein Benziner auch nur 130PS. Diesel PS zählen aber viel mehr als Benziner PS! Egal wieviel PS dein Auto hat, Drehmoment braucht es, und da hat der Diesel viel mehr, merkt man ja auch! Meiner ist schneller.
Stammtische sind ein schwieriger Ort für fachliche Diskussionen, aber trotzdem sei der Versuch gestattet etwas dazu beizutragen…