Motorblog
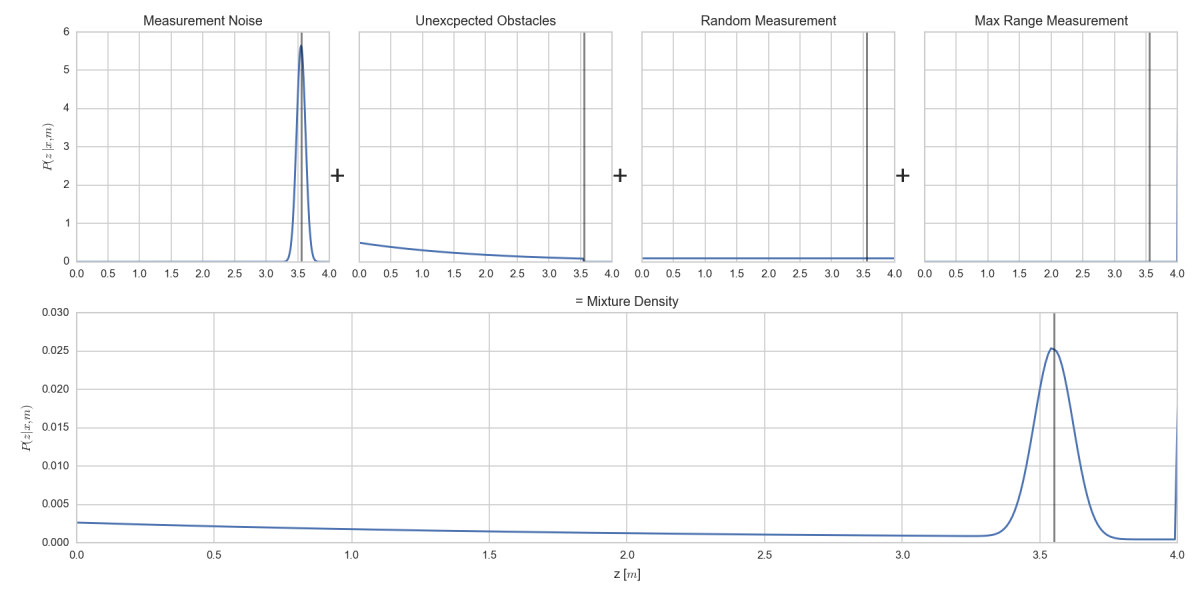
Im ersten Teil der Robotik-Sensor Reihe, wurde ein Look-Up Table für den Tinkerforge Ultraschall Sensor parametriert. Nun ist es möglich reale Entfernungen von diesem Sensor zu erhalten. Der Beitrag schloss mit den Worten, dass eine Normalverteilung für Sensorwerte nur im Bereich 1…2m anzunehmen ist. Etwas fortgeschrittene Filterverfahren, wie das Kalman Filter, arbeiten unter der Annahme, dass die Sensoren ein AWGN (Additive White Gaussian Noise) Signal ausgeben. Dies bedeutet, dass der Sensor den wahren Wert zwar messen kann, aber durch zahlreiche Fehlereinflüsse zusätzlich weißes Rauschen aufaddiert mit ausgegeben wird.
Wie nun also den ‘Wahren Wert’ erhalten?