



Autonom fahren funktioniert im Forschungsumfeld schon seit Jahrzehnten. Die Herausforderung ist, dass die Fahrzeuge nicht mit Technik voll gestopft und unbezahlbar sind. Serienreife Technologien, vor allem im Bereich der Sensorik, soll die nötige Umfeldwahrnehmung realisieren.
Google hat sich hauptsächlich auf den 360° Velodyne Lidar konzentriert, die deutschen OEM gehen einen anderen Weg. Daimler hat jetzt mit dem “Intelligent Drive” eine seriennahe Lösung vorgestellt, welche auf bewährte Sensorik setzt und dennoch ausreichende Performance liefert.
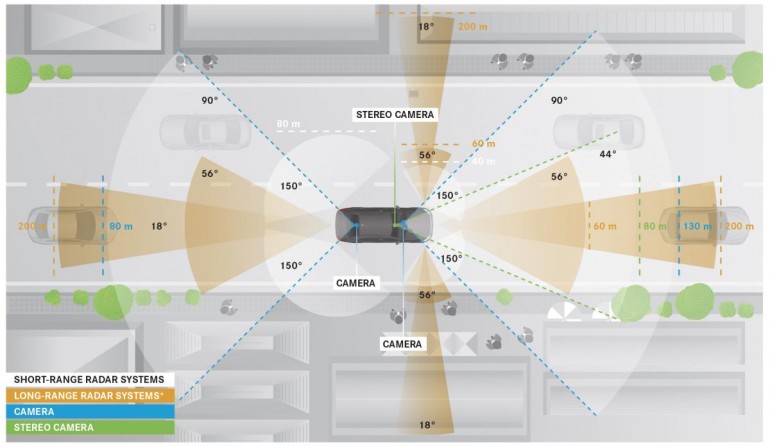
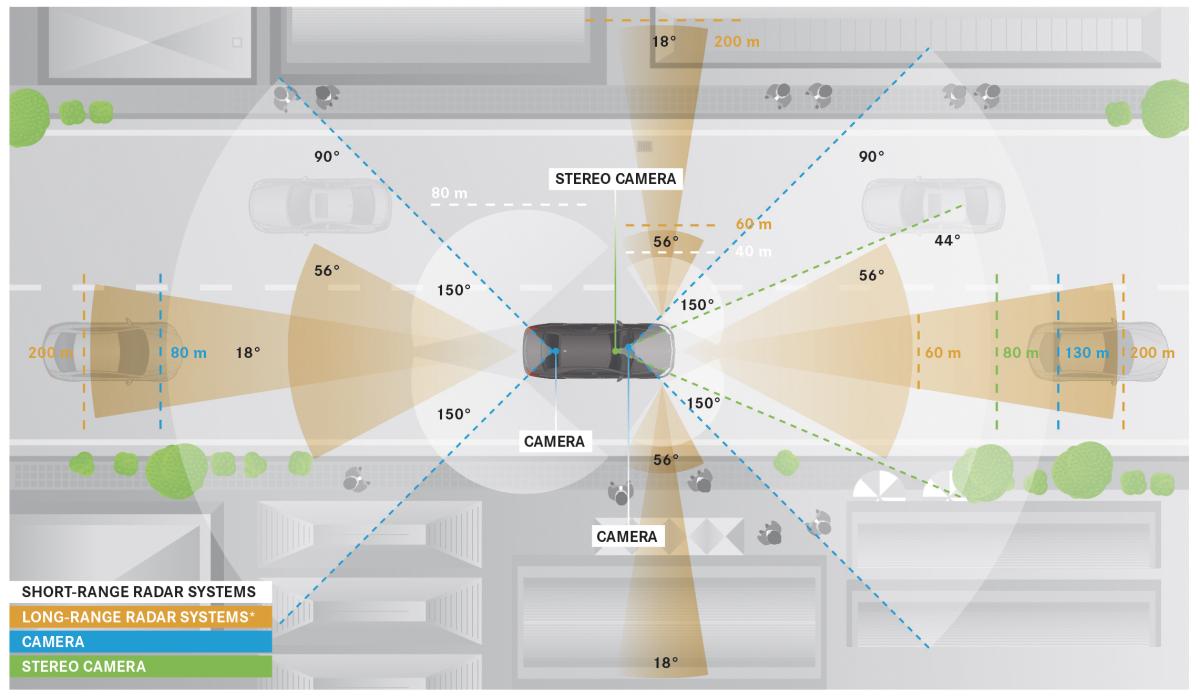
Daimler Intelligent Drive: (Stereo-)Video, Short- & Long Range Radar sowie Ultraschall liefern die Datengrundlage für Algorithmen und Umfeldmodelle. (C) media.diamler.com
Typisch für deutsche OEM ist die Verwendung von
- Kamera bzw. Stereo-Kamera
- Short- und Long-Range-Radar
- Globale Navigationssysteme (z.B. GPS)
- (Ultraschall)
- Fahrzeugdynamiksensorik (Gierrate, Geschwindigkeit, Beschleunigung, Lenkwinkel)
- Karte
Details zur Fahrt
Detailkarte zur Eigenortung
Eine nicht zu unterschlagende Information ist die detaillierte Karte der gefahrenen Strecke. Eine Grundvoraussetzung der autonomen Fahrt in urbanen Szenarien ist, dass die Fahrzeuge wissen, wo sie sich befinden. Dies aber im Zentimeter-Bereich, was durch reines Globales Navigationssystem (z.B. GPS) nicht zu realisieren ist. Die von Daimler absolvierte Strecke, die historische Bertha Benz Route, wurde vorher exakt vermessen. Jede Ampel wurde auf Zentimeter Genauigkeit kartiert und dem Fahrzeug als Datenbasis mitgegeben. Eine andere als diese Strecke hätte das Fahrzeug nicht absolvieren können, eben weil es die “Landmarken” zur Eigenlokalisierung benötigt [siehe Beispielsweise “Real-time Visual Self-localisation in Dynamic Environments“].
Auf der diesjährigen 26th Cartographic Conference wurde das Thema von Daimler ebenfalls angesprochen und ein klares Statement in Richtung Kartographie entsandt:
Navigation maps delivered not enough information for highly automated driving. Must be more information. #iccDD2013
— J.M. (@mapmakerin) August 30, 2013
new attributes like curb attribution, stop lines, per-lane widths, pedestrian crossings are necessary #iccDD2013
— J.M. (@mapmakerin) August 30, 2013
Optische Ampelerkennung
Die Zustandserkennung der Lichtsignalanlagen (grün, gelb, rot) wurde durch eine eigene Kamera realisiert. Das Fahrzeug wusste durch die Karte, an welcher Stelle sich eine Ampel für die folgende Kreuzung befinden muss und suchte an dieser Stelle nach einer Farbinformation. Die Ampel an sich wurde über Pattern-Matching im Bild gefunden.
Fazit
Daimler zeigt, dass die Technik unter bestimmten Voraussetzungen seriennah zur Verfügung steht. Ungeklärt sind nach wie vor (Stand: 2013) die rechtlichen Fragen nach Produkthaftung und Co.
Im Bericht “Rechtsfolgen zunehmender Fahrzeugautomatisierung” der Bundesanstalt für Straßenwesen heißt es:
“Sowohl auf Grund der offenen Fragen in der rechtlichen Bewertung als auch übergreifend zur Verbesserung technischer Ausgangsbedingungen sowie der Gebrauchssicherheit wird von der Projektgruppe weiterer Forschungsbedarf zur Fahrzeugautomatisierung formuliert.” – Rechtsanwalt Wolfgang Voigt, München



4 Comments