



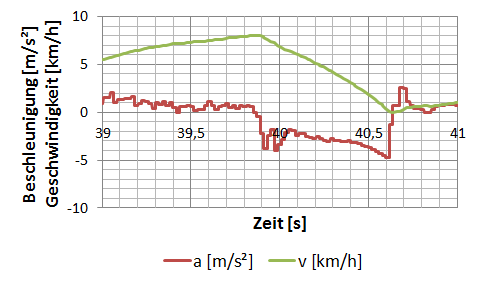
Da habe ich aber große Augen bekommen, als Dr. Zetsche heute auf der re:publica davon sprach, dass das Design der Grund wäre, weshalb Fahrzeuge deutscher Produktion mit Radar+Stereokamera ihr Umfeld wahrnehmen und nicht mit einem Laserscanner. Das Google Self-Driving-Car hingegen setzt auf Laserscanner.
Wenn Sie mal so ein Google-Fahrzeug gesehen haben, sieht das in etwa aus wie eine Mondlandefähre. Und dann haben sie oben auf dem Dach diese Teleskop-Geschichte, und die kostet in etwa so viel wie das Auto darunter.
Da mag er Recht haben, denn Google setzt auf Velodyne HDL-64E sensoren, welche 360° Rundumsicht ermöglichen.
[Update 10/2013] Aus einer Dissertation kann man entnehmen, dass auch Daimler mit dem Velodyne arbeitet, was die Aussage von Konzernchef Dr. Zetsche irgendwie noch inhaltsloser erscheinen lässt.
![Auszug aus [Schmid, M. R. (2012). Umgebungserfassung für Fahrerassistenzsysteme mit hierarchischen Belegungskarten. Universität der Bundeswehr München. Retrieved from http://d-nb.info/1030485593/]](https://www.cbcity.de/wp-content/uploads/2013/05/Daimler-Velodyne-770x605.jpg)
Auszug aus [Schmid, M. R. (2012). Umgebungserfassung für Fahrerassistenzsysteme mit hierarchischen Belegungskarten. Universität der Bundeswehr München. Retrieved from http://d-nb.info/1030485593/]

Quelle: Ibeo Laserscanner
– Der Multi-Applikations-Sensor, Braunschweiger Verkehrskolloquium, 2006
Diese Abbildung, welche aus dem Jahr 2006 stammt, zeigt zahlreiche nahtlose Integrationsmöglichkeiten, ich vermute also eher den betriebswirtschaftlichen Teil der Aussage: Denn die Sensoren sind auf Grund fehlender Massenproduktion einfach noch zu teuer.
[Update 10/2013: Auch Daimler schafft das so schön.]
![Auszug aus [Schmid, M. R. (2012). Umgebungserfassung für Fahrerassistenzsysteme mit hierarchischen Belegungskarten. Universität der Bundeswehr München. Retrieved from http://d-nb.info/1030485593/]](https://www.cbcity.de/wp-content/uploads/2013/05/Daimler-E-Klasse-Sick-Lidar-770x542.jpg)
Auszug aus [Schmid, M. R. (2012). Umgebungserfassung für Fahrerassistenzsysteme mit hierarchischen Belegungskarten. Universität der Bundeswehr München. Retrieved from http://d-nb.info/1030485593/]
4 Comments
Man kann ein Lidar ja auch dahin bauen wo die Stereokamera ist: Hinter die
Windschutzscheibe. Da hat es natürlich keinen Rundumblick, aber den hat die Stereokamera auch nicht.
Hallo Markus, die Position von der Kamera ist für den Laser nicht geeignet, da es extra Reflexionen von der Windschutzscheibe entstehen würden. Dadurch würde man z.B. viele False Positives generieren.
Die Integration vor dem Kühler ist nur bedingt empfehlenswert, da die Motrokühlung in manchen Fällen nicht ausreichen würde.
Wie gesagt: in der Forschung gibt es viel mehr Spielraum als in der Serie.
Das könnte dann zB so aussehen:
http://www.ausmotive.com/images/VW-GolfVI-04.jpg