




Innerhalb von 3 Tagen 18 Mio Aufrufe . Ein Werbevideo für ein aktives Fahrerassistenzsystem eines Volvo LKW treibt die Klicks in die Höhe. Nicht schlecht, liebe PR-Leute von Forsman & Bodenfors! Das ist wirklich episch, denn normalerweise bekommt Fahrzeugtechnik nicht solche Aufmerksamkeit.
Doch schaut man sich die Kommentare in den sozialen Netzwerken an, stellt man schnell fest, dass das eigentliche Produkt, welches beworben werden sollte, bei schätzungsweise 80% der Zuschauer nicht wahrgenommen wurde. Volvo schreibt zum Video auf Youtube:
This live test was set up to demonstrate the precision and directional stability of Volvo Dynamic Steering — a world first technology that makes the new Volvo FM easier to drive.
Allzu oft liest man Kommentare wie “Warum fahren die denn rückwärts?” oder “Weshalb ist das rückwärts abgespielt worden?”
Volvo Dynamic Steering
Das beworbene System ist eine Aktivlenkung, welche mit Hilfe von verschiedenen Sensoren den Fahrer bei der Lenkaufgabe unterstützen kann. Die Lenkung ist dabei aktiv durch einen Elektromotor ansteuerbar. Auf der Volvo Webseite schreibt ein Ingenieur:
Wenn Sie den Lastzug gerade parken, den Rückwärtsgang einlegen und das Lenkrad loslassen, können Sie praktisch so weit Sie wollen rückwärts fahren. Nach hundert Metern merken Sie vielleicht, dass Ihre Aufliegerachsen nicht mehr ganz in einer geraden Linie sind. Wenn Sie aber das gleiche ohne Volvo Dynamic Steering machen würden, käme es nach zwanzig Metern zum Klappmesser-Effekt
Klappmesser-Effekt bei Rückwärtsfahrt mit Anhänger
Der Normalfall ist, dass der Fahrer mit einem Lenkeingriff den Winkel zwischen Zugfahrzeug und Anhänger korrigieren muss. Bei der Vorwärtsfahrt wird der Winkel automatisch durch das Hinterherziehen des Anhängers 0°. Beim Rückwärts fahren gerade nicht! Dort wird er immer größer, je länger man rückwärts fährt. Es sei denn, der Fahrer erkennt die Schiefstellung und lenkt gegen. Da der Mensch aber nicht mit der Präzision eines Winkelsensors, wie er bei Volvo eingesetzt wird, den Knickwinkel zwischen Zugfahrzeug und Anhänger/Auflieger messen kann, sind es relativ große Korrekturen, die vorgenommen werden müssen.
Beschreibung der Kinematik
Möchte man den Sachverhalt auch zahlenmäßig fassen, muss man die Kinematik eines Fahrzeugs mit Anhänger in Formeln gießen. Dies hat Prof. Dr.-Ing. G.Rill in seinem Skript “Fahrdynamik” sehr gut getan, weshalb ich es direkt von dort übernehme:
Die Fahrtrichtungsänderung des LKW in Abhängigkeit des Lenkwinkels δ, Längsgeschwindigkeit v und des Radstands a, kann vereinfacht beschrieben werden mit
\(\dot \gamma=\frac{v}{a}\cdot \tan{\delta}\)Der Knickwinkel, also der Winkel zwischen Zugfahrzeug und Auflieger, kann mit den Parametern Radstand a, Abstand Kuppelpunkt-Hinterachse b und Abstand Kuppelpunkt Anhängerachse c, nachfolgend beschrieben werden:
\(\dot \kappa = – \frac{v}{a}\left(\frac{a}{c}\sin{\kappa}+\left(\frac{b}{c}\cos{\kappa}+1\right)\tan{\delta}\right)\)Nun könnte man diese Differentialgleichungen kompliziert analytisch lösen oder einfach numerisch integrieren, um ein paar Aussagen zu bekommen.
Normalerweise reichen selbst minimale Abweichungen von der exakten Geradeausfahrt, um das Gespann innerhalb kurzer Zeit bzw. Fahrstrecke zu verkeilen.
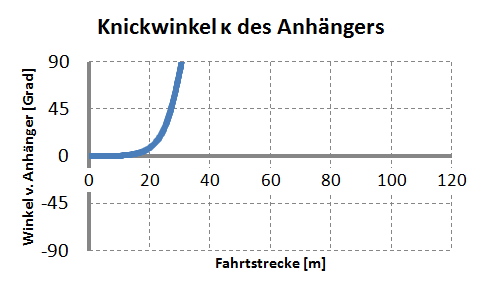
Winkel zwischen Anhänger und Zugfahrzeug ohne Gegenlenken mit anfänglichem Knickwinkel von nur 0,057°
Das Dynamic Steering von Volvo misst einfach den Knickwinkel und lenkt minimal gegen. Da der Sensor eine wesentlich bessere Auflösung als der “Mensch mit Blick in den Spiegel” hat, sind die Lenkbewegungen so minimal, dass Van Damme episch im Spagat zwischen den Spiegeln stehen kann. Im einfachsten Fall wird nur ein Proportionalregler parametriert, welcher schlicht genau in dem Maße gegenlenkt, wie der Anhänger schief steht.
\(\delta = – \kappa\)Weitere Funktionen des Dynamic Steering im Video von Volvo:
Download der Excel Datei
Wer mal selbst herumprobieren möchte:
Download Excel Datei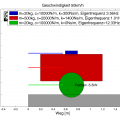

One Comment